Navigation Stack
1. Overview
탐색 스택은 개념 수준에서 매우 간단합니다. 주행 거리계 및 센서 스트림에서 정보를 받아 속도 명령을 출력하여 이동 기지로 보냅니다. 그러나 임의의 로봇에서 탐색 스택을 사용하는 것은 조금 더 복잡합니다. 탐색 스택을 사용하기위한 전제 조건으로 로봇은 ROS를 실행하고 tf 변환 트리가 있어야하며 올바른 ROS 메시지 유형을 사용하여 센서 데이터를 게시해야합니다. 또한 로봇의 모양과 역학이 높은 수준으로 수행되도록 탐색 스택을 구성해야합니다. 이 프로세스를 돕기 위해이 매뉴얼은 일반적인 탐색 스택 설정 및 구성에 대한 안내서 역할을합니다.
6. Tutorials
6.1 Basic ROS Navigation Tutorials
1. Setting up your robot using tf
이 튜토리얼은 tf 사용을 시작하도록 로봇을 설정하는 가이드를 제공합니다.
2. Basic Navigation Tuning Guide
이 가이드는 로봇에서 ROS 탐색 스택을 조정하는 방법에 대한 표준 조언을 제공합니다.
이 안내서는 포괄적 인 것은 아니지만 프로세스에 대한 통찰력을 제공해야합니다. 또한이 게시물에 앞서 ROS Navigation Tutorial을 읽어 보도록 권장합니다.이 안내서는 로봇에 탐색 스택을 설정하는 방법에 대한 개요를 제공하므로이 가이드는 프로세스에 대한 조언 만 제공합니다.
3. Setup and Configuration of the Navigation Stack on a Robot
이 학습서는 로봇에서 탐색 스택을 실행하는 방법에 대한 단계별 지시 사항을 제공합니다.
다루는 주제 : tf를 사용하여 변환 전송, 주행 거리 정보 게시, ROS를 통해 레이저에서 센서 데이터 게시 및 기본 탐색 스택 구성.
4. Using rviz with the Navigation Stack
이 튜토리얼에서는 탐색 스택과 함께 rviz를 사용하여 로컬라이제이션 시스템을 초기화하고 로봇에 목표를 보내고 탐색 스택이 ROS를 통해 게시하는 많은 시각화를 볼 수있는 가이드를 제공합니다.
5. Publishing Odometry Information over ROS
이 학습서는 탐색 스택에 대한 측량 정보를 공개하는 예제를 제공합니다. 여기에는 ROS를 통한 nav_msgs / Odometry 메시지 게시와 tf를 통한 "odom" 좌표 프레임에서 "base_link" 좌표 프레임으로의 변환이 모두 포함됩니다.
6. Publishing Sensor Streams Over ROS
이 학습서는 ROS를 통해 두 가지 유형의 센서 스트림 (sensor_msgs / LaserScan 메시지 및 sensor_msgs / PointCloud 메시지)을 보내는 예제를 제공합니다.
Basic Navigation Tuning Guide
설명 :이 안내서는 로봇에서 ROS 탐색 스택을 조정하는 방법에 대한 표준 조언을 제공합니다. 이 안내서는 포괄적 인 것은 아니지만 프로세스에 대한 통찰력을 제공해야합니다. 또한이 게시물에 앞서 ROS Navigation Tutorial을 읽어 보도록 권장합니다.이 안내서는 로봇에 탐색 스택을 설정하는 방법에 대한 개요를 제공하므로이 가이드는 프로세스에 대한 조언 만 제공합니다.
1. Is the robot navigation ready?
새 로봇에서 탐색 스택을 튜닝 할 때 발생하는 대부분의 문제는 로컬 플래너의 튜닝 매개 변수 외부 영역에 있습니다. 내비게이션을 효과적으로 실행하기 위해 로봇, 위치, 센서 및 기타 필수 구성 요소의 주행 거리계에 문제가있는 경우가 종종 있습니다. 따라서 내가하는 첫 번째 일은 로봇 자체가 내비게이션 준비 상태인지 확인하는 것입니다. 이것은 범위 센서, 주행 거리 측정 및 지역화의 세 가지 구성 요소 검사로 구성됩니다.
1.1 Range Sensors
로봇이 레이저와 같은 범위 센서에서 정보를 얻지 못하면 탐색 기능이 작동하지 않습니다. rviz에서 센서 정보를 볼 수 있는지, 상대적으로 정확하고 예상 속도로 들어오는 지 확인합니다.
1.2 Odometry
Setup and Configuration of the Navigation Stack on a Robot
http://wiki.ros.org/navigation/Tutorials/RobotSetup
1. Robot Setup
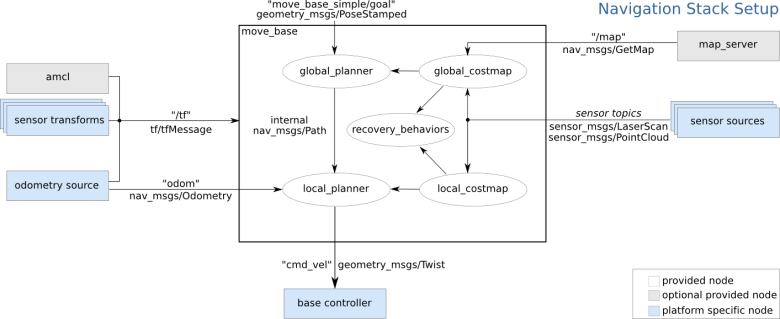
네비게이션 스택은 로봇이 달리기 위해 특정 방식으로 구성되어 있다고 가정합니다. 위의 다이어그램은이 구성의 개요를 보여줍니다. 흰색 구성 요소는 이미 구현 된 필수 구성 요소이고, 회색 구성 요소는 이미 구현 된 선택적 구성 요소이며, 각 로봇 플랫폼에 대해 파란색 구성 요소를 작성해야합니다. 탐색 스택의 전제 조건과 각 요구 사항을 충족하는 방법에 대한 지침이 아래 섹션에 제공됩니다.
1-2 Transform Configuration (other transforms)
navigation stack 을 사용하려면 로봇이 tf를 사용하여 좌표 프레임 간의 관계에 대한 정보를 게시해야합니다. 이 구성 설정에 대한 자세한 자습서는 Transform Configuration.에서 찾을 수 있습니다.