터틀이를 입양한 분들이 가장 (돈 쓴) 보람을 느끼는 때가 SLAM 테스트를 처음했을 때 인것 같습니다.
(* 이글은 터틀봇ROS체험기2 의 다음글 입니다.)
학생 분들 중 SLAM 은 로봇이나 자율차가 스스로 움직이는 기술이라고 잘못 짐작하는 경우가 간혹 있는데 이름에서 보다시피 Simultaneous Localization and Mapping, 그러니까 대략 동시에 맵을 만들면서 자기 위치를 인식하는 기술 이라는 뜻이더군요. 즉, 자율차의 경우는 SLAM 을 안해도 차선만 인식하면 달릴 수 있습니다.
물론 자율차도 차선 내의 내 위치라든지 도로 상의 내 위치 경로 상의 내 위치를 인식하면서 달리긴 하지만, GPS/IMU 와 Ladar/Camera (혹은 라이다) 에 많은 의존을 하고 있고, 앞으로 그것을 SLAM 이라고 부르기 보다는 그냥 Localization 이라는 용어가 더 popular 하게 사용이 되니까요.

그럼 왠지 네이밍 부터 살짝 간지가 있는 SLAM 은 누가 왜 필요할까요?
주로 실내 로봇이나 자율 지게차나 시설 내 물류 로봇 등이 그 주인공이라고 보면 될 것 같습니다.
네, 얘들은 움직일때 차선도 없고, GPS도 그닥 도움이 안되는 환경에 있으니까요.
참고로 SLAM 자체에 대한 포스트는 따로 할 예정입니다.
아마 1년을 공부해도 다 알지 못할 분야이기 때문에 마스터가 되는것은 포기하고 열심히 공부하면 되겠습니다. :D
터틀이는 그 SLAM 을 하는 실내 로봇 중 학습 체험형이라고 생각이 드네요.
당연히 터틀봇 사이트를 보면서 테스트를 하였습니다. -> 여기

터틀봇 조립 전에 시뮬을 워낙 고생하면서 해봤기 때문에 리얼 터틀봇과 PC 에서 수행하는것 자체는 쉽더군요.
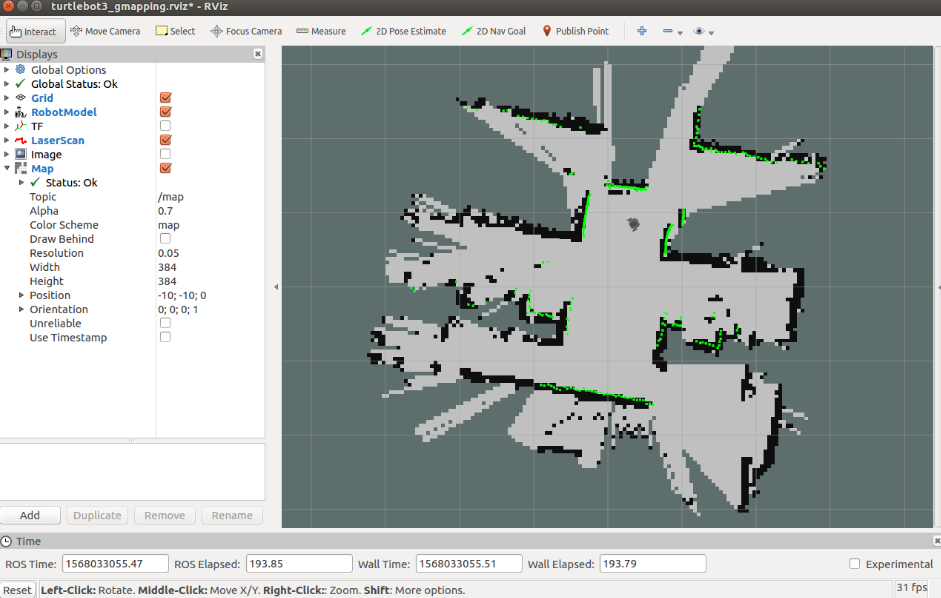
gmapping 으로 salm 을 시작 한 후 teleop 으로 조작하면서 지도를 작성했습니다.

rqt 를 보면 적어도 ros 에서 어떤 노드가 어떤 관계를 맺고 무엇을 주고 받는지는 알 수 가 있습니다.
소스 분석할 때 도움이 될 것 같습니다.

gmapping 외에 karto 를 써서도 SLAM 을 해보았습니다. 일단 저는 모양은 gmapping 이 마음에 드는군요.


SLAM 을 통해 map 을 얻어내면 그것을 네비게이션에 사용을 해야하는데 이에 관련해서는 다음 포스트에 작성하도록 하겠습니다.
다음 포스트는 가상로봇으로 SLAM/Navigation 을 짠~ 해보는 내용입니다. Jetson가상로봇 슬램네비 !!
'ROS + 로봇 제어' 카테고리의 다른 글
| ROS teleop Key 구독자 발행자 테스트 (1) | 2020.05.13 |
|---|---|
| 터틀봇이랑 ROS /SLAM 체험기 2 (0) | 2019.09.28 |
| 터틀봇이랑 ROS 체험 코스 2 (0) | 2019.09.18 |
| 터틀이 세팅 (3. PC와 라즈 네트워크 세팅) (0) | 2019.09.15 |
| 터틀봇이랑 ROS 체험 코스 1 (0) | 2019.09.08 |



